Álgebra Vectorial
Habiendo ya introducido la noción de Vector en el artículo anterior, es importante profundizar un poco más en cómo operar con este ente matemático. El objetivo de este artículo en entregar sólo una noción básica que permita entender las aplicaciones que tendrá esta materia en los artículos siguientes.
Definición de Vector
Se define como Vector a un ente matemático que queda determinado por un número real, y una dirección y sentido. Usualmente se representa por una flecha contenida en un espacio bidimensional o tridimensional, cuya longitud es proporcional al número que define al vector, y cuya orientación manifiesta su dirección (recta que contiene al vector) y sentido (hacia dónde apunta la punta de la fecha en la recta que la contiene).

Para diferenciar a los escalares de los vectores en expresiones algebraicas (lo cual ocurre a menudo), en general se desgina a los escalares como letras comunes, mientras que a los vectores de los representa con una letra con una flecha sobre ella (por ejemplo: ). También es usual que a los vectores se les asigne una letra en negrita (v).
). También es usual que a los vectores se les asigne una letra en negrita (v).
Al número que define el "largo" del vector se le denomina norma o módulo del mismo, y se simboliza con un par de barras a cada lado del símbolo de dicho vector, o con la letra sin la flecha sobre la misma:


Para diferenciar a los escalares de los vectores en expresiones algebraicas (lo cual ocurre a menudo), en general se desgina a los escalares como letras comunes, mientras que a los vectores de los representa con una letra con una flecha sobre ella (por ejemplo:
 ). También es usual que a los vectores se les asigne una letra en negrita (v).
). También es usual que a los vectores se les asigne una letra en negrita (v).Al número que define el "largo" del vector se le denomina norma o módulo del mismo, y se simboliza con un par de barras a cada lado del símbolo de dicho vector, o con la letra sin la flecha sobre la misma:

Componentes de un Vector
Para facilitar su especificación, por lo general los vectores se vinculan a lo que se denomina un Sistema de Referencia. Éstos constante de un origen de coordenadas "O", del cual se originan lo que se denominan "ejes coordenados" (2 para un espacio bidimensional plano, 3 para un espacio tridimensional), los cuales por lo general están en ángulos de 90° entre sí. Estos sistemas permiten definir, en forma única, cada punto de su espacio con un conjunto de números correspondientes a su distancia a cada eje (2 para espacio bidimensional, 3 para especio tridimensional), a los que se les denomina coordenadas.
Para el punto en el sistema bidimensional siguiente, la ubicación de dicho punto se puede definir con las coordenadas x e y; se puede indicar también el par (x,y).











Para el punto en el sistema bidimensional siguiente, la ubicación de dicho punto se puede definir con las coordenadas x e y; se puede indicar también el par (x,y).

Para el punto en el sistema tridimensional siguiente, la ubicación de dicho punto se puede definir con las coordenadas x, y, y z; se puede indicar también el trío (x,y,z).

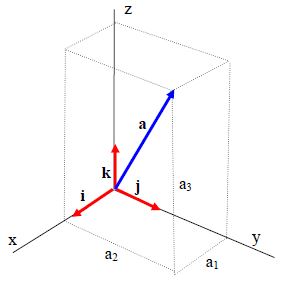
En el caso de los vectores, una práctica usual es definirlos con su cola puesta en el origen de coordenadas, de modo que éste queda completamente definido con las coordenadas de la ubicación de su flecha. Esto se puede apreciar en la figura siguiente, para un caso tridimensional.

En este caso, el vector puede definirse mediante las coordenadas de su extremo:

En vez de utilizar los subíndices 1, 2 y 3 para las coordenadas, también es usual utilizar los subíndices x, y y z. De este modo:

El módulo de un vector puede obtenerse fácilmente a partir de sus coordenadas. Utilizando el teorema de pitágoras, puede demostrarse que, para el caso bidimensional:

Y para el tridimensional:

Con respecto a la orientación del vector, las coordenadas pueden ser también de bastante ayuda. Para el caso bidimensional, la dirección y sentido del vector se determinan fácilmente con el ángulo entre el vector y el tramo positivo del eje x, con valor positivo en sentido antihorario (es decir, si el ángulo es negativo, aparece por debajo del eje x en vez de ser por arriba. Es lo que se denominan coordenadas polares. La imagen siguiente ilustra lo anterior.

En tal caso, las coordenadas del vector pueden definirse como:

en donde "sin" y "cos" son las funciones seno y coseno del ángulo, respectivamente.
Para el caso tridimensional, se requieren 2 ángulos para definir la dirección de un vector. Para ello, existe más de una alternativa, tal como las coordenadas cilíndricas y las esféricas. No se profundiza en éstas ahora, pero se incluyen imágenes como referencia:
Cilíndricas:
Esféricas:
La dirección de un vector también puede quedar especificada en función de su vector unitario. Esto se tratará más adelante en este capítulo.
Adición de Vectores
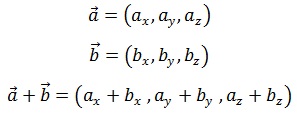
La adición de vectores es una operación bastante similar a la adición de escalares. En términos de componentes, consiste simplemente en sumar las componentes correspondientes. Por lo tanto, para sumar dos vectores a y b:

En términos geométricos, existen dos métodos para efectuar la adición de vectores: el método del polígono y el del paralelógramo.
El método del polígono consiste simplemente en conectar el extremo de uno de los vectores con el origen del otro. Luego, el vector que conecta el origen del primero con el extremo del último corresponde a la suma de ambos. La imagen siguiente ilustra lo anterior.

Este método tiene la ventaja de que permite sumar fácilmente más de 2 vectores a la vez. Esto se efectúa poniendo el origen de cada vector que se quiera sumar a continuación del extremo del vector anterior; finalmente, la suma total es la unión del origen del primero con el extremo del último:


El método del paralelógramo consiste en conectar los orígenes de 2 vectores a sumar. Luego, se dibuja el paralelógramo (figura con lados opuestos paralelos) asociado a estos vectores. Finalmente, al conectar el vértice que contiene el origen de los vectores con el vértice opuesto a este último, se obtiene el vector suma. Lo anterior se puede apreciar en la imagen siguiente.

Los tres métodos descritos anteriormente son equivalentes, de modos que conducen a los mismos resultados. Además, permiten demostrar que la adición de vectores, al igual que para escalares, es conmutativa, es decir, el resultado es el mismo independientemente del orden en que se efectúe la operación.
El método del polígono consiste simplemente en conectar el extremo de uno de los vectores con el origen del otro. Luego, el vector que conecta el origen del primero con el extremo del último corresponde a la suma de ambos. La imagen siguiente ilustra lo anterior.

Este método tiene la ventaja de que permite sumar fácilmente más de 2 vectores a la vez. Esto se efectúa poniendo el origen de cada vector que se quiera sumar a continuación del extremo del vector anterior; finalmente, la suma total es la unión del origen del primero con el extremo del último:


El método del paralelógramo consiste en conectar los orígenes de 2 vectores a sumar. Luego, se dibuja el paralelógramo (figura con lados opuestos paralelos) asociado a estos vectores. Finalmente, al conectar el vértice que contiene el origen de los vectores con el vértice opuesto a este último, se obtiene el vector suma. Lo anterior se puede apreciar en la imagen siguiente.

Los tres métodos descritos anteriormente son equivalentes, de modos que conducen a los mismos resultados. Además, permiten demostrar que la adición de vectores, al igual que para escalares, es conmutativa, es decir, el resultado es el mismo independientemente del orden en que se efectúe la operación.
Inverso Aditivo y Sustracción de Vectores
El inverso aditivo de un vector se define del mismo modo que para escalares: anteponiendo un signo "-" al número. En términos de componentes, esto se logra aplicando el inverso aditivo a cada componente. De este modo:

En términos geométricos, el inverso aditivo de un vector es simplemente uno que mantiene el módulo y dirección, pero que posee sentido inversos (es decir, sólo se intercambia su origen con su extremo).

Lo anterior permite definir la sustracción de 2 vectores como la adición del primero con el inverso aditivo del segundo, es decir:

Por lo tanto, en términos de componentes, la sustracción de vectores corresponde simplemente a la sustracción de sus componentes:

Y, en términos geométricos, la sustracción de vectores corresponde a sumar el primero con el inverso aditivo del segundo, ya sea por medio del método del polígono o del paralelógramo:

Nuevamente, todos los métodos anteriores conllevan a resultados equivalentes.

En términos geométricos, el inverso aditivo de un vector es simplemente uno que mantiene el módulo y dirección, pero que posee sentido inversos (es decir, sólo se intercambia su origen con su extremo).

Lo anterior permite definir la sustracción de 2 vectores como la adición del primero con el inverso aditivo del segundo, es decir:

Por lo tanto, en términos de componentes, la sustracción de vectores corresponde simplemente a la sustracción de sus componentes:


Nuevamente, todos los métodos anteriores conllevan a resultados equivalentes.
Multiplicación de un Vector por un Escalar
En lo que respecta a vectores, la multiplicación tiende a diferenciarse de la que aplica normalmente para escalares puros; de hecho, existe más de un tipo de multiplicación para vectores. Sin embargo, la multiplicación de un vector por un escalar, es bastante simple y de hecho se asemeja bastante a la multiplicación convencional.
En términos de componentes, la multiplicación de un escalar por un vector se efectúa simplemente multiplicando dicho escalar por cada componente del vector, resultando a partir de esto otro vector. De este modo:

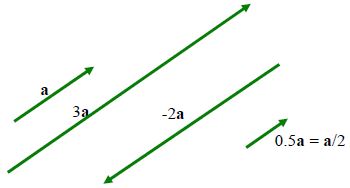
A partir de lo anterior, se pueden deducir 3 aspectos relevantes de esta operación:

Los puntos anteriores permiten definir esta operación en términos geométricos. La imagen siguiente muestra algunos ejemplos de lo anterior:

La multiplicación de un vector por escalar es conmutativa, es decir, puede efectuarse en cualquier orden.
Cabe destacar que también es posible definir la división entre un vector y un escalar (sólo en ese orden) como la multiplicación de dicho vector por el inverso multiplicativo del escalar. Es decir:

Todo vector puede ser representado en base a estos vectores unitarios, del siguiente modo:







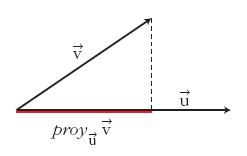
Otra aplicación muy relevante del producto escalar es que permite encontrar fácilmente la proyección de un vector sobre otro. Por ejemplo, en la siguiente imagen, se muestra la proyección de un vector v sobre un vector u.

Si definimos la proyección resultante como otro vector, entonces la longitud de dicha proyección será el módulo del vector antes mencionado. Se puede demostrar que la longitud de la proyección es el producto escalar entre el vector a proyectar y el vector unitario sobre el cual se proyectará:

Y, si se quiere obtener finalmente el vector proyección, sólo basta multiplicar el resultado anterior (escalar) por el vector unitario de la dirección sobre la que se proyectó:

En términos de componentes, la multiplicación de un escalar por un vector se efectúa simplemente multiplicando dicho escalar por cada componente del vector, resultando a partir de esto otro vector. De este modo:

A partir de lo anterior, se pueden deducir 3 aspectos relevantes de esta operación:
- El módulo del vector original se ve modificado en la proporción correspondiente al escalar. Matemáticamente, el módulo del resultado de la multiplicación es el módulo del vector original multiplicado por el valor absoluto del escalar. Es decir:

- Dado que el escalar afecta a cada componente del vector original por igual, esto implica que la dirección del vector no varía después de la operación.
- El signo del escalar determina el sentido del vector resultante: si el escalar es positivo, el sentido se mantiene igual; si en negativo, tomará el sentido contrario al original.
Los puntos anteriores permiten definir esta operación en términos geométricos. La imagen siguiente muestra algunos ejemplos de lo anterior:
La multiplicación de un vector por escalar es conmutativa, es decir, puede efectuarse en cualquier orden.
Cabe destacar que también es posible definir la división entre un vector y un escalar (sólo en ese orden) como la multiplicación de dicho vector por el inverso multiplicativo del escalar. Es decir:

Vectores Unitarios y Descomposición Canónica
El apartado anterior permite la definición de Vector Unitario. Éste corresponde a un vector de módulo 1, y que posee la misma dirección y sentido que su vector originador. Por lo general, se simboliza con la misma letra que dicho vector, pero con un "gorro chino" en vez de la flecha sobre ésta.
El vector unitario puede obtenerse fácilmente tomando el vector original, y dividiéndolo por su módulo (que es un escalar). De este modo, el módulo del vector unitario será siempre 1:

La importancia de los vectores unitarios como éste es que contienen la información de dirección y sentido del vector original. De este modo, es una alternativa a los métodos con ángulos (tales como coordenadas polares u otras) para especificar hacia dónde apunta un vector. En función de esto, todo vector puede ser descompuesto en la multiplicación de su módulo (que contiene la información de "intensidad" del vector) por su vector unitario (que contiene la información de orientación):

Por otro lado, existen unos vectores unitarios especiales, denominados Vectores Unitarios Fundamentales. Éstos corresponden a vectores unitarios que apuntan en cada una de las direcciones (y con sentido positivo) de los ejes coordenados. En el caso de un espacio tridimensional, para los ejes x, y y z, se definen los vectores unitarios fundamentales i, j y k, respectivamente. Éstos pueden definirse explícitamente del siguiente modo (en el caso bidimensional, se omite k):


Dada su definición, todos ellos cumplen con la condición de ser unitarios.

El vector unitario puede obtenerse fácilmente tomando el vector original, y dividiéndolo por su módulo (que es un escalar). De este modo, el módulo del vector unitario será siempre 1:

La importancia de los vectores unitarios como éste es que contienen la información de dirección y sentido del vector original. De este modo, es una alternativa a los métodos con ángulos (tales como coordenadas polares u otras) para especificar hacia dónde apunta un vector. En función de esto, todo vector puede ser descompuesto en la multiplicación de su módulo (que contiene la información de "intensidad" del vector) por su vector unitario (que contiene la información de orientación):

Por otro lado, existen unos vectores unitarios especiales, denominados Vectores Unitarios Fundamentales. Éstos corresponden a vectores unitarios que apuntan en cada una de las direcciones (y con sentido positivo) de los ejes coordenados. En el caso de un espacio tridimensional, para los ejes x, y y z, se definen los vectores unitarios fundamentales i, j y k, respectivamente. Éstos pueden definirse explícitamente del siguiente modo (en el caso bidimensional, se omite k):

Dada su definición, todos ellos cumplen con la condición de ser unitarios.

Todo vector puede ser representado en base a estos vectores unitarios, del siguiente modo:

A ésta se le denomina Descomposición Canónica de un vector. Aunque esto pudiera parecer sólo un cambio de notación, al tratarse de una descomposición algebraica en ocasiones facilita la operatoria con vectores.
Producto Escalar de Vectores
Un tipo de multiplicación entre vectores se denomina Producto Escalar, o también Producto Punto; el nombre proviene del hecho de que el resultado de la multiplicación es un Escalar. Se simboliza con un punto de multiplicación entre ambos vectores. En términos de componentes, se obtiene a partir de la sumatoria de los productos de las componentes correspondientes entre ambos vectores. En concreto:

Una consecuencia relevante de esta operación es la siguiente: el producto punto entre dos vectores corresponde a la multiplicación del módulo de cada uno, por el coseno del ángulo entre ambos cuando comparten el mismo origen. Es decir:


Combinando las dos ecuaciones anteriores, el producto punto se vuelve una herramienta potente para calcular el ángulo entre 2 vectores cuyas coordenadas se conocen.

Una consecuencia relevante de esta operación es la siguiente: el producto punto entre dos vectores corresponde a la multiplicación del módulo de cada uno, por el coseno del ángulo entre ambos cuando comparten el mismo origen. Es decir:


Combinando las dos ecuaciones anteriores, el producto punto se vuelve una herramienta potente para calcular el ángulo entre 2 vectores cuyas coordenadas se conocen.
Algunas propiedades relevantes de esta operación son las siguientes:
- El producto escalar es una operación conmutativa.

- El producto escalar de dos vectores paralelos es simplemente el producto de sus módulos.

- El producto escalar de dos vectores perpendiculares (con ángulo mutuo de 90°) es cero.

- El producto escalar de un vector consigo mismo es el cuadrado de su módulo.

- El producto escalar de dos vectores unitarios fundamentales iguales es siempre 1.

- El producto escalar de dos vectores unitarios fundamentales distintos es siempre 0.

Otra aplicación muy relevante del producto escalar es que permite encontrar fácilmente la proyección de un vector sobre otro. Por ejemplo, en la siguiente imagen, se muestra la proyección de un vector v sobre un vector u.
Si definimos la proyección resultante como otro vector, entonces la longitud de dicha proyección será el módulo del vector antes mencionado. Se puede demostrar que la longitud de la proyección es el producto escalar entre el vector a proyectar y el vector unitario sobre el cual se proyectará:

Y, si se quiere obtener finalmente el vector proyección, sólo basta multiplicar el resultado anterior (escalar) por el vector unitario de la dirección sobre la que se proyectó:

Finalmente, cabe destacar que el producto escalar puede definirse sin problemas para espacios bidimensionales o tridimensionales; de hecho, al menos en términos matemáticos, puede definirse para espacios con 4 dimensiones o más.
Sistemas Tridimensionales Dextrógiros
Antes de definir el siguiente tipo de multiplicación entre vectores, es importante considerar lo que se denomina un Sistema Coordenado Dextrógiro, lo cual solamente aplica para sistemas tridimensionales.
Según lo descrito anteriormente, un sistema coordenado tridimensional se construye a partir de tres rectas perpendiculares entre sí que representas los ejes del sistema. Hasta el momento, no hemos indicado una limitación para seleccionar los sentidos positivos de cada eje. De aquí nace la necesidad de especificar qué es un Sistema Coordenado Dextrógiro: es un sistema cuyos semiejes positivos cumplen con la Regla de la Mano Derecha. Esta regla, mostrada en la imagen al final del párrafo, requiere lo siguiente: si ubicamos los 4 dedos de la mano derecha que no son el pulgar de forma tal que indiquen una rotación desde el semieje positivo X hacia el semieje positivo Y, entonces el pulgar de la mano deberá apuntar en el sentido del semieje positivo Z.

Si un sistema es Dextrógiro, cumple con la regla de la mano derecha según se indicó anteriormente. De todos modos, simultáneamente, cumple con esta regla descrita de los siguiente 2 modos:
Por lo general, los sistemas coordenados utilizados en Física son Dextrógiros. Ésta la es la convención usual a nivel internacional.
Producto Vectorial de Vectores
Para que el siguiente desarrollo acerca del Producto Vectorial entre Vectores sea válido, siempre se deberá trabajar en sistemas dextrógiros.
El Producto Vectorial, también denominado Producto Cruz, es una operación de multiplicación entre vectores que da como resultado un nuevo Vector. Se simboliza con una cruz de multiplicación entre ambos vectores. En términos de componentes, se obtiene a partir de la siguiente expresión:

Una forma más compacta de representar lo anterior, en especial para quienes estén familiarizados con el cálculo de determinantes de matrices, es expresarlo como el determinante de tercer orden en donde la primera fila contiene los vectores unitarios i, j y k, y la segunda y tercera fila contiene los componentes del primer y segundo vector a multiplicar, respectivamente:

El desarrollo de este determinante conduce a la siguiente expresión en función de sus sub-determinantes de segundo orden:

Luego, teniendo en consideración que el resultado de un determinante de segundo orden es simplemente el producto de la diagonal principal menos el producto de la diagonal secundaria:

es posible obtener la ecuación con que se definió el producto cruz en primer lugar.
De la definición, es posible deducir una descripción más intuitiva y gráfica para esta operación:
El resultado del producto cruz de dos vectores será otro vector, perpendicular al plano que contiene los 2 vectores originales (es decir, perpendicular a ambos vectores simultáneamente), cuyo sentido apuntará en el que indique la regla de la mano derecha al considerar los dedos girando desde el primer vector de la multiplicación hacia el segundo, y cuyo módulo será el producto de los módulo de cada vector original, multiplicado por el seno del ángulo entre ellos.
Lo anterior se refleja en la siguientes ecuación e imagen:


De todas las definiciones, las que nuevamente son todas equivalentes, es posible deducir las siguiente propiedades relevantes:






Se puede memorizar el punto anterior más fácilmente si se considera la imagen siguiente: si 2 vectores unitarios se multiplican en el sentido antihorario de la figura, el resultado será el vector que sigue en ese sentido con signo positivo; y si se multiplican en el sentido horario de la figura, el resultado será el vector que sigue en ese sentido con signo negativo.

Un par de las aplicaciones geométricas más relevantes de esta operación son las siguientes:


El álgebra vectorial descrita en este artículo es una herramienta fundamental para el desarrollo de muchos conceptos en Física.
Según lo descrito anteriormente, un sistema coordenado tridimensional se construye a partir de tres rectas perpendiculares entre sí que representas los ejes del sistema. Hasta el momento, no hemos indicado una limitación para seleccionar los sentidos positivos de cada eje. De aquí nace la necesidad de especificar qué es un Sistema Coordenado Dextrógiro: es un sistema cuyos semiejes positivos cumplen con la Regla de la Mano Derecha. Esta regla, mostrada en la imagen al final del párrafo, requiere lo siguiente: si ubicamos los 4 dedos de la mano derecha que no son el pulgar de forma tal que indiquen una rotación desde el semieje positivo X hacia el semieje positivo Y, entonces el pulgar de la mano deberá apuntar en el sentido del semieje positivo Z.

Si un sistema es Dextrógiro, cumple con la regla de la mano derecha según se indicó anteriormente. De todos modos, simultáneamente, cumple con esta regla descrita de los siguiente 2 modos:
- Si ubicamos los 4 dedos de la mano derecha que no son el pulgar de forma tal que indiquen una rotación desde el semieje positivo Y hacia el semieje positivo Z, entonces el pulgar de la mano deberá apuntar en el sentido del semieje positivo X.
- Si ubicamos los 4 dedos de la mano derecha que no son el pulgar de forma tal que indiquen una rotación desde el semieje positivo Z hacia el semieje positivo X, entonces el pulgar de la mano deberá apuntar en el sentido del semieje positivo Y.
Por lo general, los sistemas coordenados utilizados en Física son Dextrógiros. Ésta la es la convención usual a nivel internacional.
Producto Vectorial de Vectores
Para que el siguiente desarrollo acerca del Producto Vectorial entre Vectores sea válido, siempre se deberá trabajar en sistemas dextrógiros.
El Producto Vectorial, también denominado Producto Cruz, es una operación de multiplicación entre vectores que da como resultado un nuevo Vector. Se simboliza con una cruz de multiplicación entre ambos vectores. En términos de componentes, se obtiene a partir de la siguiente expresión:
Una forma más compacta de representar lo anterior, en especial para quienes estén familiarizados con el cálculo de determinantes de matrices, es expresarlo como el determinante de tercer orden en donde la primera fila contiene los vectores unitarios i, j y k, y la segunda y tercera fila contiene los componentes del primer y segundo vector a multiplicar, respectivamente:

El desarrollo de este determinante conduce a la siguiente expresión en función de sus sub-determinantes de segundo orden:
Luego, teniendo en consideración que el resultado de un determinante de segundo orden es simplemente el producto de la diagonal principal menos el producto de la diagonal secundaria:

es posible obtener la ecuación con que se definió el producto cruz en primer lugar.
De la definición, es posible deducir una descripción más intuitiva y gráfica para esta operación:
El resultado del producto cruz de dos vectores será otro vector, perpendicular al plano que contiene los 2 vectores originales (es decir, perpendicular a ambos vectores simultáneamente), cuyo sentido apuntará en el que indique la regla de la mano derecha al considerar los dedos girando desde el primer vector de la multiplicación hacia el segundo, y cuyo módulo será el producto de los módulo de cada vector original, multiplicado por el seno del ángulo entre ellos.
Lo anterior se refleja en la siguientes ecuación e imagen:

De todas las definiciones, las que nuevamente son todas equivalentes, es posible deducir las siguiente propiedades relevantes:
- El producto vectorial es una operación anti-conmutativa (es decir, al invertir el orden de la operación, se obtiene el vector original, pero con sentido opuesto):

- El módulo del producto vectorial de dos vectores perpendiculares es simplemente el producto de sus módulos.

- El producto vectorial de dos vectores paralelos es el vector cero.

- El producto vectorial de un vector consigo mismo es también el vector cero.

- El producto vectorial de dos vectores unitarios fundamentales iguales es siempre el vector cero.

- El producto escalar de dos vectores unitarios fundamentales distintos será el otro vector unitario fundamental, siempre que se operen en el orden que define al sistema como dextrógiro. Si se operan al revés, el resultado tendrá el sentido contrario:

Se puede memorizar el punto anterior más fácilmente si se considera la imagen siguiente: si 2 vectores unitarios se multiplican en el sentido antihorario de la figura, el resultado será el vector que sigue en ese sentido con signo positivo; y si se multiplican en el sentido horario de la figura, el resultado será el vector que sigue en ese sentido con signo negativo.

Un par de las aplicaciones geométricas más relevantes de esta operación son las siguientes:
- El producto cruz permite encontrar fácilmente el vector normal unitario asociado al plano definido por un par de vectores. Luego de efectuar el producto cruz entre ambos, simplemente se divide el resultado por su propio módulo:

- El módulo del producto cruz de dos vectores permite encontrar el área del paralelógramo definido por ambos:

El álgebra vectorial descrita en este artículo es una herramienta fundamental para el desarrollo de muchos conceptos en Física.
Excelente
ResponderEliminar